
The final project for Mechatronics course featured teams of three autonomous robots playing hockey against each other. I worked collaboration with Cheryl Liu and Andrew Block. I was primarily responsible for the mechanical design, and I assisted with the circuitry and programming.
The bots determined their location using modified wii remote sensors reading an overhead IR light constellation. An array of IR sensors around the base determined the location of the puck which radially emitted IR light. The robots were controlled by the M2, a custom microcontroller for the class based on the ATMEL32U4 microcontroller. All of the code was written in C.
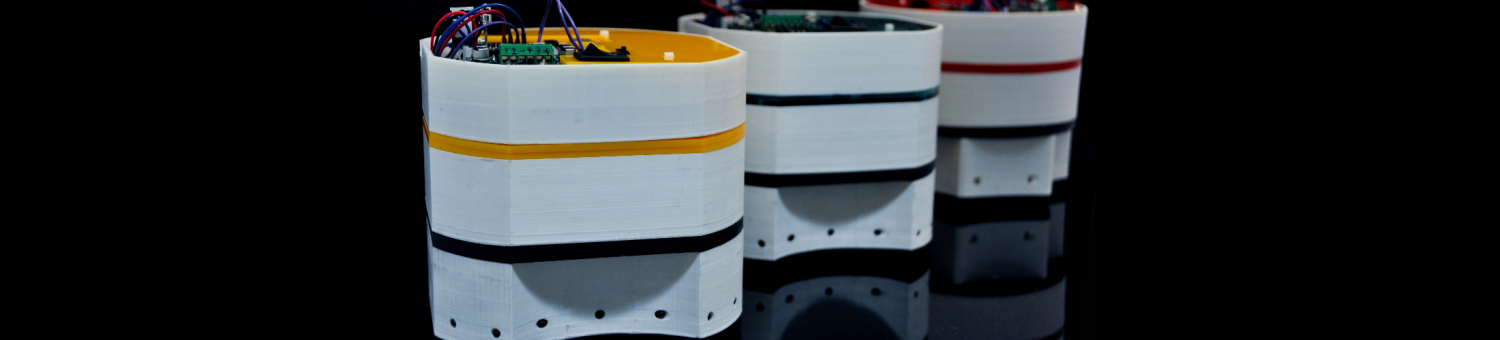
The frame on our bots is composed of stacked laser cut ABS sheets and 3D printed PLA shells. The drive train is detailed below. During assembly all cavities were filled with lead shot bringing the total weight of each bot to 8.5 lbs.





